隨著礦山機電技術的發展,多種原理和結構的自動風門在礦井下都有應用[1-2]。其中,基于 PLC 控制的機電液一體化自動風門具有明顯的綜合優勢,已成為主要發展方向[3]。然而現有的 PLC 控制系統對人員和礦車不加區分,采取相同的簡單控制方式,不能滿足多變的運行要求。
筆者將智能化設計理論用于自動風門的 PLC 控制系統設計,根據礦車和人員通過時光電傳感器信號脈寬不同的特點,對礦車和人員加以區分,并對人員通過的復雜情況加以區分,采取相應的動作。此外,根據系統特點設計了故障診斷及報警程序,以較低成本實現了控制系統智能化,提高了運行可靠性。
1 PLC 控制的機電液一體化風門工作原理
1.1 風門液壓系統
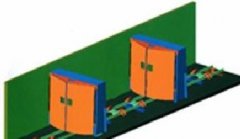
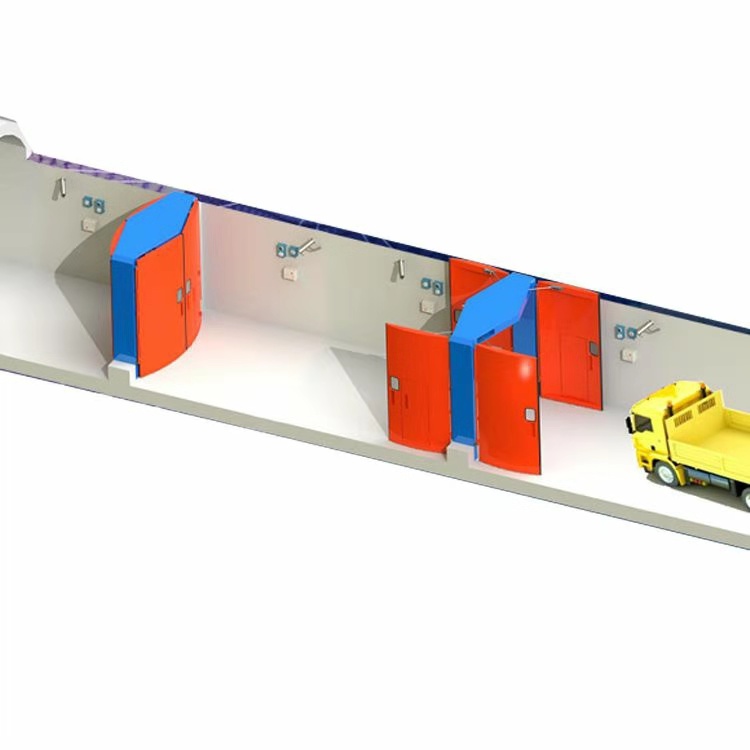
2 道風門互鎖,以免同時開啟導致風流短路。風門液壓系統原理如圖 1 所示。
2 個液壓缸分別為 2 道風門啟閉提供動力。PLC 通過控制電磁鐵 DT1~DT4 的通斷來控制 2 個三位四通方向閥的動作,進而分別控制 2 個液壓缸,實現門的開啟和關閉。DT5 用于控制液壓系統的工作與卸荷狀態的示,A、B 2 道風門互鎖。
智能風門自動控制系統設計
根據智能化設計理論,從兩方面對風門控制系統進行智能化設計:① 采用智能識別與控制,針對不同情況采取不同動作;② 增加智能故障診斷,實現對系統自身的運行監控[5]。
人員與礦車的智能識別,是實現風門控制系統智
現有的方法針對礦車和人員分別設置兩類不同傳感器。由于井下環境惡劣,軌道上設置的礦車傳感器極易損壞,人員識別傳感器也不可靠。增加傳感器種類和數量,不僅會增加成本,也不利于現有控制系統升級改造。